ROS 2 Over Email: rmw_email, an Actual Working RMW Implementation
September 19, 2021
Reading time ~13 minutes
tl;dr ROS 2's architecture allows for using almost any middleware, as long as it's done through RMW, the middleware interface. rmw_email contains a middleware that sends & receives strings over email and an RMW implementation that allows ROS 2 to use this middleware to exchange messages. While it's certainly not a production-level middleware, it provides interesting insight into the pros and cons of ROS 2's architecture. Abstractions definitely have a cost, but they're also quite powerful: they allow ROS 2 to run over email without needing to modify it at all!
- Introduction
- Motivation
- Overview
- The components of a working(ish) RMW implementation
- Demo
- Performance
- Tracing
- Limitations and future work
- Conclusion
- Links
- Update (2022-05-07)
- Update (2025-10-26)
- References
Introduction
ROS 2’s architecture and underlying middleware are vastly different from ROS 1’s, in part because ROS 2 is targeted at real-time distributed applications. The middleware interface, rmw, is an abstraction that allows ROS 2 to support multiple different middleware implementations. On top of that, there’s rcl, which provides a common implementation in C to support client libraries for any language. Finally, there’s rclcpp and rclpy, the C++ and Python client libraries, respectively. While there definitely are downsides to these abstractions and interfaces, this architecture is very powerful.
In this post, I’ll present rmw_email, which allows ROS 2 to exchange messages using emails. I’ll start by explaining the motivation behind rmw_email. Then I’ll provide an overview and explain how each component works. After that, I’ll show a couple of demos and present the results of performance experiments. Finally, I’ll briefly discuss limitations and possible future work, and then I’ll conclude.
Motivation
The main motivation for rmw_email was my master’s. I got the high-level idea for this in June of 2020. At that point, I had been working on and around ROS 2 for about a year. I had interacted a lot more with the higher levels of the ROS 2 architecture (rclcpp, rcl) while working on ros2_tracing, so I wanted to dig deeper into the middleware level and below (rmw, DDS/other middleware).
I was also seeing some interesting discussions involving middlewares and the middleware interface. Developers of real-time applications (e.g., automotive) wanted to expose middleware features that were rather DDS-specific through rmw. This could possibly make the abstraction “leak,” thereby breaking it at least slightly. Of course, it’s a tradeoff between maintaining the abstraction itself to keep the benefits vs. making ROS 2 more powerful by allowing users to leverage advanced middleware features and possibly reducing the costs of the abstraction and the general overhead of ROS 2. [1, 2]
Also, at the time, there weren’t many non-DDS rmw implementations; even if they do exist, there are actually currently no non-DDS implementations listed under the latest ROS 2 distro in REP 2000. Perhaps adding another one – as absurd as it may be – could help diversify the ROS 2 middleware implementations and illustrate how useful the current abstraction can be. This was even on the ROS 2 roadmap at some point.
And, also, why not? We just can! Sure, DDS is a proven standard to exchange messages, but so is email! Besides, I don’t own a fax machine.
Overview
rmw_email, the repository/project, consists mainly of two packages: email, the middleware, and rmw_email_cpp, the RMW implementation.
email is a simple middleware with the publisher/subscriber pattern to send and receive string messages on topics. It also natively supports the service client/server (RPC) pattern. As its name suggests, emails are used to send messages: the topic or service name is the email subject and the message content is the email body.
rmw_email_cpp is an implementation of the ROS 2 middleware interface, rmw, using email. It uses an external package that does the hard work to convert messages to YAML. Then it converts them to YAML strings and passes them on to email. Indeed, email knows nothing about all the different ROS 2 messages; it simply handles strings.
The components of a working(ish) RMW implementation
In the beginning, I had a rough goal: get ROS 2 working over email. Fortunately, in a way, it’s a rather straightforward process, since it can be split into a few components.
Middleware
The middleware should really be usable on its own, so I started by only focusing on that.
At its core, email simply sends and receives emails using libcurl’s C API. Emails are sent using the SMTP protocol and received by polling using the IMAP protocol. Polling is done by first getting the unique identifier (UID [3]) of the next expected email using the EXAMINE IMAP command [4]. Then it polls until there’s a new email, increments the UID value, and repeats the process. Polling is done on a dedicated thread, while emails are sent synchronously (currently, at least).
Each email message contains metadata that is included as both custom and standard email headers. All emails include a source timestamp and the GID (i.e., a unique ID) of the source object (i.e., publisher, service client, or service server). Additionally, service requests and responses contain a sequence number, and service responses also contain the GID of the service client that made the original request. This is required so that the service response is matched with the original request and delivered to the corresponding service client.
Also, service responses are email replies to the corresponding service request email! This is achieved using standard headers: the values of the In-Reply-To and References headers of the response email are set to the value of the Message-ID header of the request email [5]. All of this is possible without polluting the email as shown in a normal email client.
Let’s illustrate this with the simple server/client example below.
Message-ID: <a1.b2@mx.rmw-email.com>
Client-GID: 4074879933
Request-Sequence-Number: 42
Source-Timestamp: 1631797734037229979
In-Reply-To:
References:
From: client@rmw-email.com
To: server@rmw-email.com
Cc:
Bcc:
Subject: /my_service
this is my request!Message-ID: <d4.f5@mx.rmw-email.com>
Client-GID: 4074879933
Request-Sequence-Number: 42
Source-Timestamp: 1631797743507593177
In-Reply-To: <a1.b2@mx.rmw-email.com>
References: <a1.b2@mx.rmw-email.com>
From: server@rmw-email.com
To: client@rmw-email.com
Cc:
Bcc:
Subject: /my_service
this is a response!The server will receive the email on the left for the request and the client will receive the email reply on the right for the response.
When a new email is received by the polling thread, it is passed on to email handlers. All subscriptions, service clients, and service servers register with those handlers. Handlers use the email’s headers and topic/service name to figure out what kind of message it is and which object it belongs to.
Since sending and receiving emails requires an email account, the path to a configuration file with email login credentials and recipients (to/cc/bcc) must be provided through an environment variable. There is also an intraprocess mode. If enabled, email acts as if it was sending emails to itself, bypassing the very last step of sending/receiving emails. This means that it still relies on email headers, so it has to fake the Message-ID header value, since it is normally added by the email server.
The email design document contains a lot more information and even contains fancy UML diagrams! The API documentation can also provide more insight. Along with that, the email_examples package contains many examples.
While certainly time-consuming, this part was rather fun to create from scratch.
Common message representation
Since we have a middleware that strictly deals with strings, we need to be able to convert ROS 2 messages to strings and convert those strings back to messages.
I knew about type support introspection from reading ROS 2 source code and documentation. It provides metadata about a given message type that allows you to parse the fields of a message given only a type-erased pointer to the message (i.e., void *). Note that it would have been possible to generate code that does this for each message type, similar to how a to_yaml() function is generated for each message type. Also, rosidl_runtime_py can convert YAML strings to messages (e.g., for ros2 topic pub), but it’s in Python.
My first idea was to convert the bytes of the messages to Base64 and send that string over email, but that would have been a bit boring. A while later, after I had a basic working middleware, I saw a post on ROS Discourse about a package to convert messages to a YAML representation. It only supported C messages, though, which was a problem since I needed to support both C and C++ messages. I looked over the code to see how it worked and then I looked at the ROS 2 IDL documentation and this document to understand what I needed to change to adapt it to C++. C structures for message arrays make this task simple – at the expense of being more complex to use – since they keep track of size and capacity. C++ containers make it complicated!
For example, how can you figure out the size of a std::vector<T> if you know the size of the contained type, sizeof(T), but only have a void * to it? This is the case for unbounded dynamic arrays of a non-built-in type, like an array of PointField in a PointCloud2 message. The answer is: by Googling it knowing implementation details! A std::vector object simply contains three pointers: begin, end, and end capacity. Since the elements are stored contiguously, size is simply (end - begin) / sizeof(T)! Fun fact: that trick doesn’t work with std::vector<bool>, because its implementation is different, but that’s not a problem here.
Update: this workaround is not actually needed. See below.
I forked the package, added support for C++ messages, made the message<–>YAML conversion symmetrical, and refactored the repository/packages a bit. Below is a simple example of a C++ std_msgs/Header message and the corresponding YAML representation.
builtin_interfaces::msg::Time stamp;
stamp.sec = 4;
stamp.nanosec = 20U;
std_msgs::msg::Header msg;
msg.stamp = stamp;
msg.frame_id = "my_frame";stamp:
sec: 4
nanosec: 20
frame_id: my_frameEven starting from the implementation for C messages, writing the introspection code for C++ messages was a nice challenge. I’m sure some things could be improved and I might have done some things wrong (although it does work!). It could nonetheless serve as another example of how to do type support introspection.
RMW implementation
To tie everything together, we need to implement the rmw interface for email.
Writing the implementation, rmw_email_cpp, was fairly straightforward. I primarily read the rmw API documentation and looked at other implementations, like rmw_cyclonedds_cpp and rmw_fastrtps_cpp. This summary was also pretty useful to get started!
I knew I would have to modify email in order to support the requirements of the rmw interface. However, it wasn’t until I started working on the implementation that I figured out what I needed to add. The main missing feature was wait sets. With early versions of email, users had would have had to manually poll a subscription for new messages. This is of course not how ROS 2 works; it uses wait sets which allow waiting on different events at the same time in a standard way. For example, you can add all subscriptions, service clients, and service servers to the wait set and ask it to wait. Once that’s done, you can check the wait set to get a list of objects that have a new message, response, or request, and deal with them appropriately.
Some of those features weren’t necessary for a simple email-based string pub/sub/service “middleware,” but adding them definitely improved it and turned it into a sort-of middleware. Obviously, the rmw interface has many other features, like quality of service (for real applications) and introspection (e.g., to support ros2 topic list). Those are not currently supported by rmw_email_cpp, but PRs are welcome!
This layer is where I saw the downsides of the ROS 2 abstractions. Many things are duplicated or very similar: APIs, data structures, arguments validation, etc. Calls often go from rclcpp to rcl to rmw and, finally, to the middleware. While each layer does have its own responsibilities – otherwise we wouldn’t have all those layers – a lot of the actual work is done by the middleware. Furthermore, since DDS has always been the main – and pretty much only – middleware standard, parts of the interface, like the writer GUID field in the request ID struct, are rather DDS-specific.
However, I also saw the clear benefits of these abstractions and interfaces. I didn’t have to write too much code to plug email into ROS 2; I only had to implement an interface. A few bugs aside, after implementing the main rmw functions, running ROS 2 over email just… worked!
Demo
After all of that, it’s time for a demo! First, let’s see what our email inbox looks like when running the classic talker/listener demo.
$ EMAIL_CONFIG_FILE=talker.email.yml \
RMW_IMPLEMENTATION=rmw_email_cpp \
ros2 run demo_nodes_cpp talker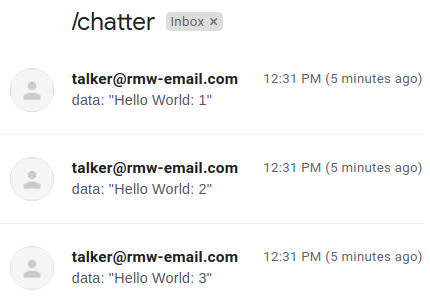
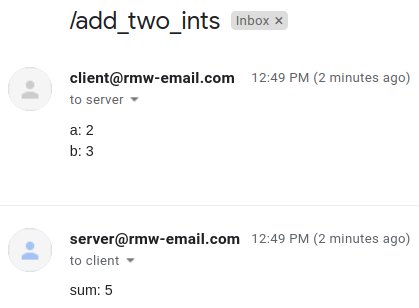
talker node with rmw_email_cpp and resulting emails on the /chatter topic.Since messages only go in one direction in the above example, let’s see a client/server example using the add_two_ints service demo.
$ EMAIL_CONFIG_FILE=client.email.yml \
RMW_IMPLEMENTATION=rmw_email_cpp \
ros2 run demo_nodes_cpp add_two_ints_client
Result of add_two_ints: 5
$ EMAIL_CONFIG_FILE=server.email.yml \
RMW_IMPLEMENTATION=rmw_email_cpp \
ros2 run demo_nodes_cpp add_two_ints_server
Incoming request
a: 2 b: 3/add_two_ints service request and response.As mentioned previously, we can see the reply to the request email in this example.
Performance
We can use performance_test to measure pub/sub latencies and compare them to another RMW implementation. The current default implementation is rmw_cyclonedds_cpp, so let’s compare to that.
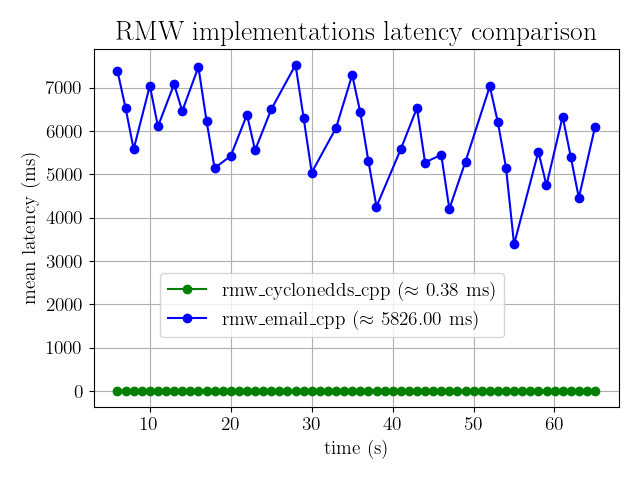
rmw_email_cpp and rmw_cyclonedds_cpp.With a mean latency of around 6 seconds over the one-minute experiment, rmw_email_cpp is clearly worse than rmw_cyclonedds_cpp. Approximately 15 332 times worse. Not that we expected anything else, obviously!
The results are different if we run the experiments on a real-time system: PREEMPT_RT-patched Ubuntu Server 20.04.2 (5.4.3-rt1), Intel i7-3770 4-core CPU @ 3.40 GHz (SMT disabled), 8 GB RAM, and SCHED_FIFO policy with the highest priority (99).
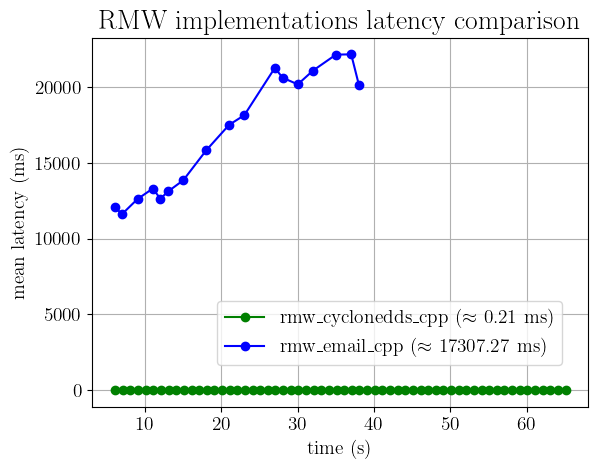
rmw_email_cpp and rmw_cyclonedds_cpp on a real-time system.As expected, the latencies for rmw_cyclonedds_cpp are much lower on a real-time system. However, the latencies for rmw_email_cpp get worse! The data also stops halfway through the experiment because performance_test throws an exception if messages are not received in the order that they are sent. This assertion could be removed from the performance_test code to compare two complete experiments, but, surely, it’s not a good sign when a middleware shuffles messages!
We could pose that most of the time is spent between the two libcurl calls to send and receive emails, i.e., server-side. To explore this hypothesis, we can enable intraprocess mode for email and run the experiments again.
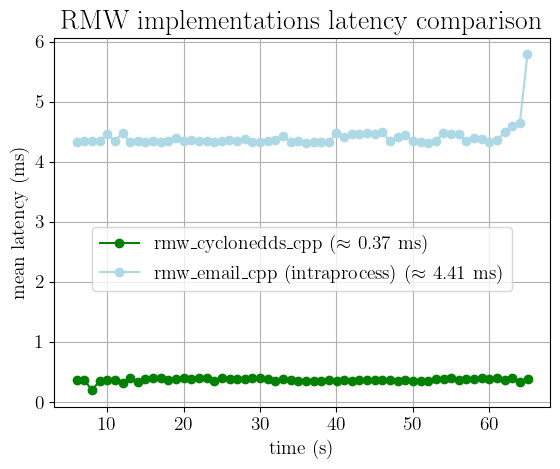
rmw_email_cpp (intraprocess) and rmw_cyclonedds_cpp.The latencies are then much more comparable. They’re now only about 12 times higher, although it would be worse if we did a fair comparison using Cyclone DDS with iceoryx for shared memory inter-process communications. rmw_email_cpp’s message<–>YAML conversion is without a doubt no match for rmw_cyclonedds_cpp’s (de)serialization, and the liberal use of std::string objects internally most likely doesn’t help. It would definitely be interesting to investigate this.
Tracing
Just in case low-overhead instrumentation is needed to investigate real-time performance issues with rmw_email, I added LTTng tracepoints. rmw_email_cpp uses the ros2_tracing instrumentation & tracepoints for the rmw layer. email has its own LTTng tracepoints to collect lower-level information in order to correlate it with the ROS 2 trace data.
Limitations and future work
Unsurprisingly, there are many limitations, with the main ones being high message latency and low pub/sub rate. Also, as mentioned previously, messages might be received in the wrong order. This could be due to Gmail’s infrastructure, since having sub-millisecond latencies and guaranteeing that emails are always in the right order are probably not high priorities. Tackling those limitations might be possible, but it could be argued that it’s not worth the effort.
Nonetheless, many other paths could be explored. Type support introspection could be replaced with static type support (i.e., generated code) to try to lower latencies. Also, although we could compare this to DDS domain IDs, configuration files currently impose a direction on a whole process’ communications unless all emails are sent to & from the same address. Config files could be improved to allow users to specify per-topic or per-namespace email recipients. Furthermore, the email standards and infrastructure could be leveraged even more to get interesting features. For example, mailing lists could be used as a form of configurable “multicast.” Finally, message filtering could be achieved by setting up rules in an email client to forward emails based on the messages’ content.
Conclusion
In conclusion, I presented rmw_email, which contains a standalone middleware as well as a ROS 2 middleware implementation to exchange messages using emails.
ROS 2’s abstractions lead to additional complexity and overhead, but they’re also quite powerful – now you can worry about getting SLAM SPAM into your Nav2 stack! Ultimately, it’s an interesting debate between users who benefit from and need that abstraction, and those who prefer to break it a little bit to have direct access to the underlying middleware. There might be a better middle ground to be found or even an alternative that allows both to coexist. Or perhaps the status quo is good for most users, and those who need a more specialized version of ROS 2 can just fork it, as some have done. Even if rmw_email will never be used in production (or at all), I hope that it can provide some insight and stimulate discussions on this subject.
Aside from that, I think this project had real benefits for the ROS 2 community, both directly and indirectly. There’s of course the separate project to do symmetrical conversions between ROS 2 messages and a YAML representation. Therefore, email stuff aside, that part is probably a cool contribution to the ROS 2 community! I also got distracted embraced the open source philosophy along the way. I started using the ROS 2 tooling working group’s GitHub actions, setup-ros and action-ros-ci, for rmw_email. I contributed some improvements and new features that I needed. Additionally, I made a number of contributions to ROS 2 core packages and ROS 2 dependencies here and there.
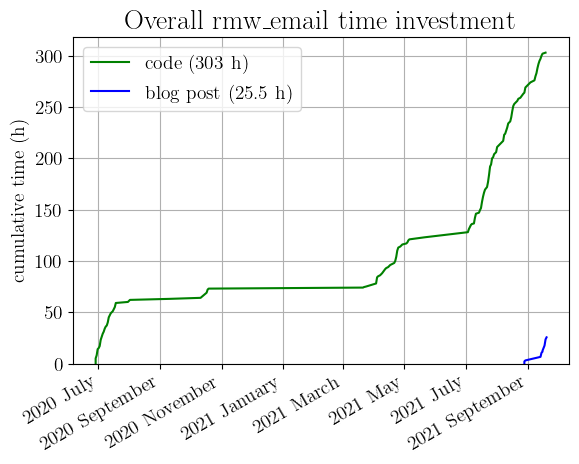
Time will tell whether or not this was more useful than my previous blog post. However, even if I received multiple facepalm emojis 🤦♂️ from a friend after sharing my “ROS 2… over email” idea, I would say that, after putting 300+ hours into this project over more than a year, I’m extremely satisfied with the outcome!
Links
- rmw_email: github.com/christophebedard/rmw_email
emaildesign document: christophebedard.com/rmw_email/design/email/emailAPI documentation: christophebedard.com/rmw_email/api/email/
- dynamic_message_introspection: github.com/osrf/dynamic_message_introspection
- the PR with changes mentioned in this post has now been merged: github.com/osrf/dynamic_message_introspection/pull/15
Update (2022-05-07)
It turns out that there is no need to use hacky ways to get the size of an array of a non-built-in type: the type support introspection tools include functions that provide this information for a given type. See: github.com/osrf/dynamic_message_introspection/pull/16.
Update (2025-10-26)
I wrote an rmw implementation guide for the ROS 2 documentation, which features rmw_email.
References
[1] Z. Jiang, Y. Gong, J. Zhai, Y.-P. Wang, W. Liu, H. Wu, and J. Jin, “Message passing optimization in robot operating system,” International Journal of Parallel Programming, vol. 48, no. 1, pp. 119–136, 2020.
[2] T. Kronauer, J. Pohlmann, M. Matthe, T. Smejkal, and G. Fettweis, “Latency overhead of ros2 for modular time-critical systems,” arXiv preprint arXiv:2101.02074, 2021.
[3] RFC 3501, section 2.3.1.1
[4] RFC 3501, section 6.3.2
[5] RFC 5322, page 26